以下、本文になります
辻内 伸好 TSUJIUCHI Nobutaka
所属・職名は2022年度現在

| 所属・職名 | 理工学部 教授 |
|---|---|
| 研究テーマ | 運動と振動の制御、ヒューマンダイナミクス、バイオメカニクス、ロボット工学 |
| 研究者DB | https://kendb.doshisha.ac.jp/profile/ja.890f83ad654b8c69.html |
| researchmap |
https://researchmap.jp/read280255?lang=ja
|
理工学部・研究科 機械力学研究室
辻内・伊藤研究室オリジナルサイト
宇宙生体医工学研究プロジェクトにおける研究内容
無重力環境や老化による筋機能低下の原因解明と予防装置の開発
骨格筋は「動作」を行うために使われるだけではなく,骨に刺激を与えるので骨格筋の量を維持するだけで骨の萎縮を予防しています.さらに,骨格筋の萎縮を予防するだけでなく,例えば寝たきりが続くと発症する加齢性筋肉減弱症(サルコペニア)など様々な生体機能の衰えの防止につながることが期待できます.そこで,下記のテーマを実施しています.
①低重力下での運動を模擬可能なNASAのARGOSと我々が開発したウエアラブル計測装置を用いて,低重力環境下で高精度な歩行実験を実施し,
②その実験結果と人体筋骨格モデルを用いたシミュレーションを比較することで,サルコペニアの原因を明らかにするとともに,
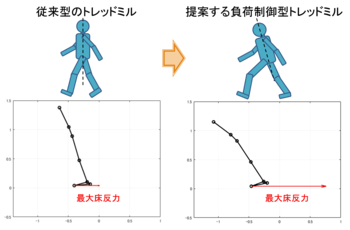
③抗重力筋であるヒラメ筋など足の関節の動きに係わる筋肉を自分の意思で動かすことが可能な自走式トレッドミルを開発しています.
④その結果を基に,コンパクトなサルコペニアの予防装置も開発しようとしています.



| 研究メンバー 後藤 琢也 廣川 純也 人見 穣 伊藤 彰人 井澤 鉄也 上林 清孝 加藤 久詞 眞部 寛之 中村 康雄 大平 充宣 斎藤 芳郎 櫻井 芳雄 髙倉 久志 竹田 正樹 辻内 伸好 宋 基燦 |