以下、本文になります
NASAのARGOS(重力免荷能動制御システム)を用いた歩行実験
2018年5月2日、低重力環境下の歩行実験のためにNASAジョンソンスペースセンター(JSC)を訪問した際の記録
-
 低重力環境下の歩行実験のためにNASA JSCを訪問 2018年5月2日 理工学研究科M1 荒木啓輔君
低重力環境下の歩行実験のためにNASA JSCを訪問 2018年5月2日 理工学研究科M1 荒木啓輔君 -
 ARGOS(重力免荷能動制御システム) 実験建屋内部の様子
ARGOS(重力免荷能動制御システム) 実験建屋内部の様子 -
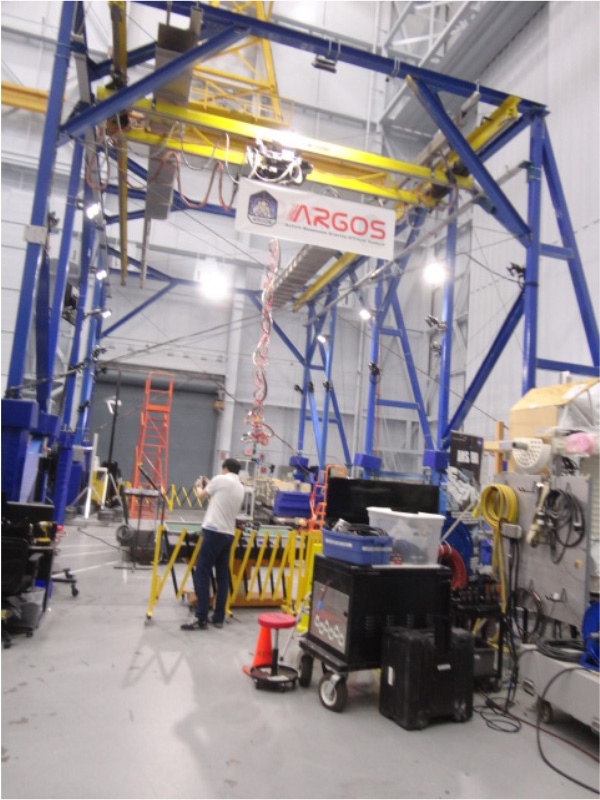 ARGOS システム全景
ARGOS システム全景 -
 ARGOS トレッドミル
ARGOS トレッドミル -
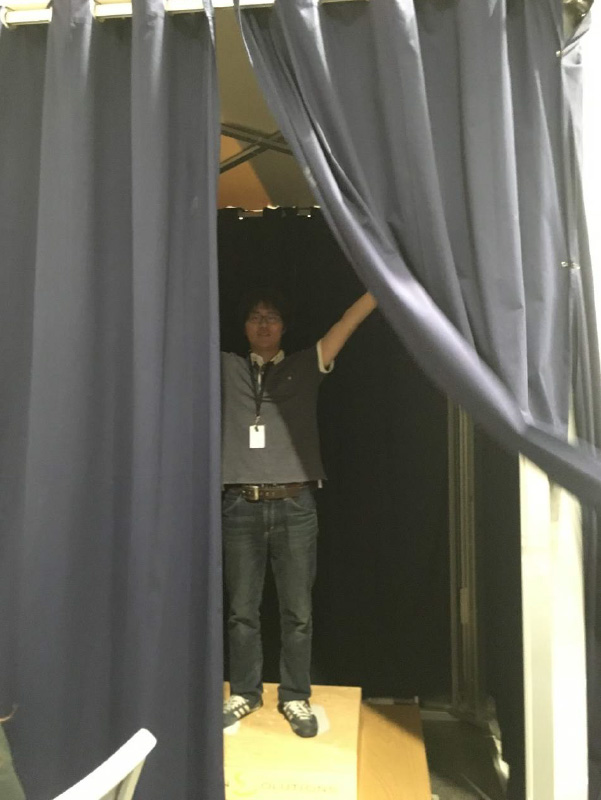
 ARGOS 体重免荷実験用ハーネスの被験者への装着状況
ARGOS 体重免荷実験用ハーネスの被験者への装着状況 -
 体重免荷実験用ハーネスを装着した被験者(背面)
体重免荷実験用ハーネスを装着した被験者(背面) -
 体重免荷実験用ハーネスを装着した被験者(側面)
体重免荷実験用ハーネスを装着した被験者(側面) -
 体重免荷実験のため被験者が吊り上げられた様子
体重免荷実験のため被験者が吊り上げられた様子 -
 ARGOSを用いてトレッドミル上を低重力環境下で歩行している様子
ARGOSを用いてトレッドミル上を低重力環境下で歩行している様子 -
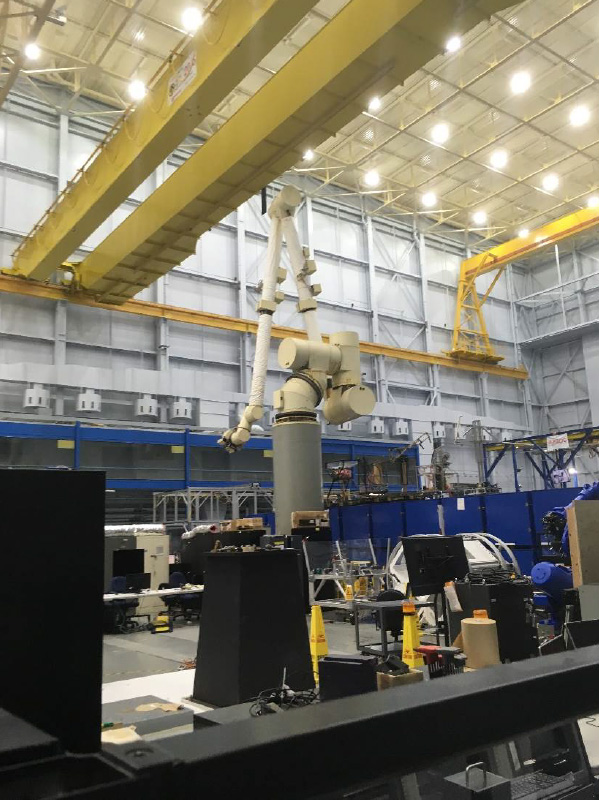 ARGOS 実験建屋内部(ISSのロボットアームの試験機)
ARGOS 実験建屋内部(ISSのロボットアームの試験機) -
 ARGOS 実験建屋内部(宇宙作業用のロボット( Robonaut2 ))
ARGOS 実験建屋内部(宇宙作業用のロボット( Robonaut2 )) -
 ARGOS実験建屋内部に設置されたISSの日本モジュール「きぼう」(実験訓練用)
ARGOS実験建屋内部に設置されたISSの日本モジュール「きぼう」(実験訓練用) -
 ARGOS 実験建屋内部に設置されたソユーズ内部の様子
ARGOS 実験建屋内部に設置されたソユーズ内部の様子 -
 ARGOS実験建屋内部に設置された船外活動用の各種宇宙服とRobonaut2
ARGOS実験建屋内部に設置された船外活動用の各種宇宙服とRobonaut2 -
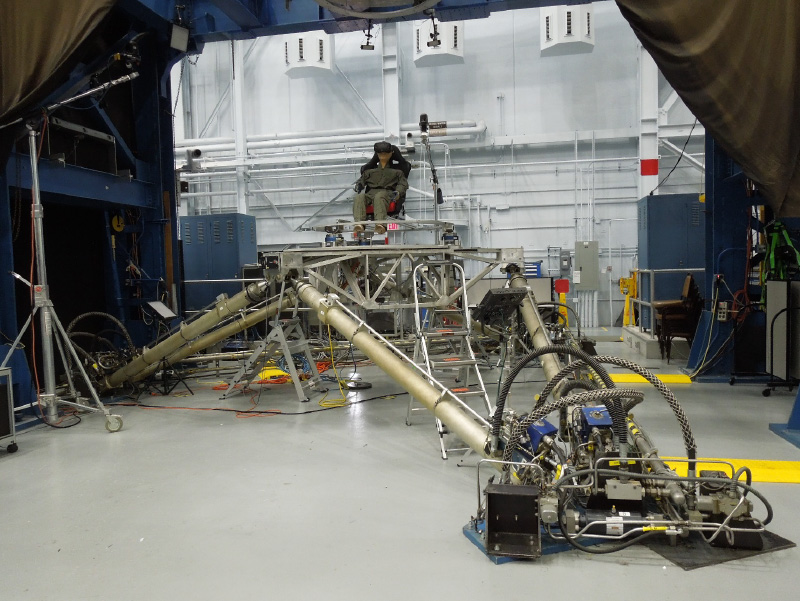 ARGOS実験建屋内部に設置された訓練用3次元運動シミュレーター
ARGOS実験建屋内部に設置された訓練用3次元運動シミュレーター -
 人体の3次元スキャニング装置(荒木君の計測風景)
人体の3次元スキャニング装置(荒木君の計測風景) -
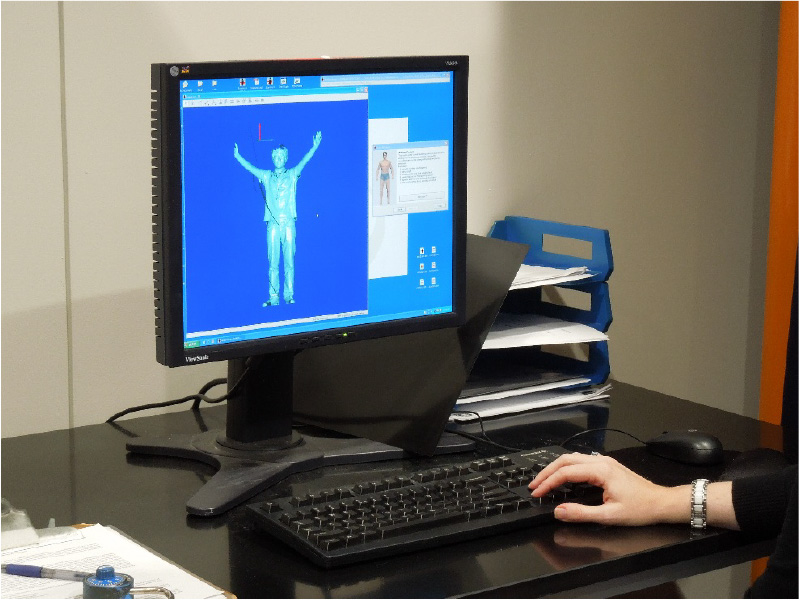 人体の3次元スキャニング装置(処理結果)
人体の3次元スキャニング装置(処理結果) -
 宇宙服着用時の上腕の動作範囲を解析するための実験装置(理工学部・伊藤彰人准教授が装着した様子)
宇宙服着用時の上腕の動作範囲を解析するための実験装置(理工学部・伊藤彰人准教授が装着した様子) -
 宇宙服着用時の上腕の動作範囲を解析するための実験装置(理工学部・伊藤彰人准教授が装着した様子)
宇宙服着用時の上腕の動作範囲を解析するための実験装置(理工学部・伊藤彰人准教授が装着した様子)
概要
-
テキサス州ヒューストンにあるLyndon B. Johnson Space Centerは、月、火星、微小重力などの減重力環境を模擬するために、重力免荷能動制御システム(ARGOS)を開発している。
- ARGOSは、歩く、走る、跳ぶなどの動的な動きの中で、人の(または動的な物体の)荷重を連続的に制御可能である。
- ARGOSは人の(または物体の)動きを水平方向および垂直方向に追跡することで、垂直方向の負荷力を厳密に目標値に制御することができる。
- 回転運動は、ARGOS /ペイロードインタフェース機構によって調整される。
- ARGOS施設が開発を完了した際には、表面作業の研究、宇宙服および宇宙船の開発や設計評価、また宇宙服着用時でもシャツ着用時でも適切な条件でのトレーニングをサポートすることが可能となる。
- またその施設では、減重力模擬環境での試験のためにローバーやロボットの重量を免荷することが可能となる。
- ARGOSの技術は、近地球小惑星、微小重力環境、月、火星、または他の目的地への将来の任務のための試験、開発、およびトレーニングをサポートすることを目的としている。
-
このプロジェクトの理念は、設計、製作、試験、そして改良することであった。
- この改善アプローチから得られた知見は、プロジェクトの設計や必要条件を達成した。
-
現在のARGOSの鉄骨構造は、3次元空間(垂直1軸、水平2軸)の動きに適応するように設計されている。
- サイズは41’x 24’ x 25’(高さ)である。
|
ギャラリー ARGOS(重力免荷能動制御システム) キックオフシンポジウム Doshisha Week 2019 その他の活動 |