以下、本文になります
Gait experiment using ARGOS (Active Response Gravity Offload System) in NASA's Johnson Space Center (JSC)
Report of the visit to NASA's Johnson Space Center (JSC) on May 2, 2018, for the gait experiment using ARGOS (Active Response Gravity Offload System).
-
 Visit to NASA’s JSC for experiments of walking under low-gravity environment (Keisuke Araki, graduate student of Science and Engineering, on May 2, 2018)
Visit to NASA’s JSC for experiments of walking under low-gravity environment (Keisuke Araki, graduate student of Science and Engineering, on May 2, 2018) -
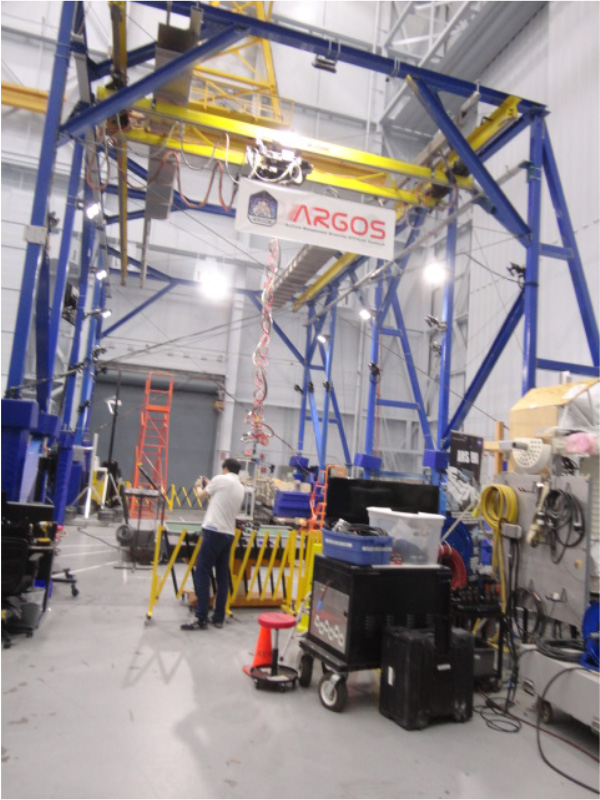
 Inside of the ARGOS laboratory
Inside of the ARGOS laboratory -
 Whole view of the ARGOS
Whole view of the ARGOS -
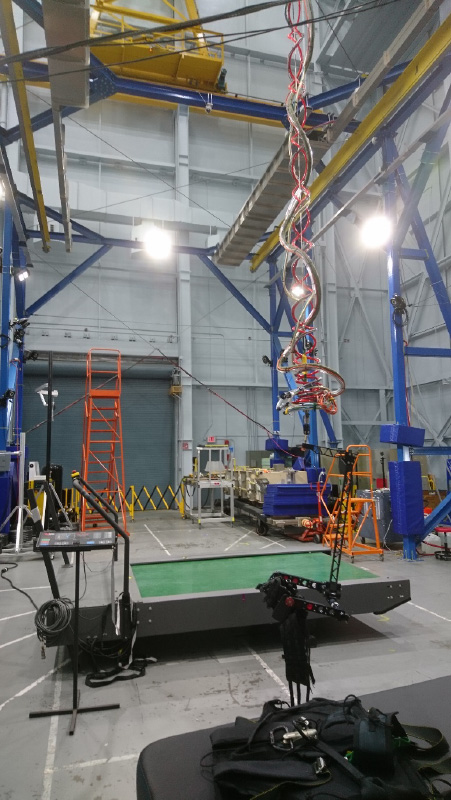 ARGOS treadmill
ARGOS treadmill -
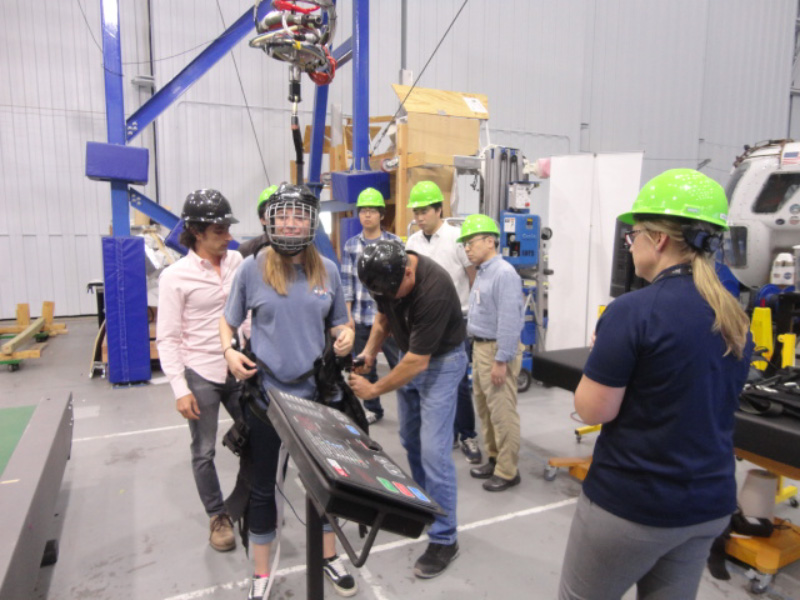 Examinee putting on a harness for weight offloading experiment
Examinee putting on a harness for weight offloading experiment -
 Examinee wearing a harness for weight offloading experiment (back)
Examinee wearing a harness for weight offloading experiment (back) -
 Examinee wearing a harness for weight offloading experiment (side)
Examinee wearing a harness for weight offloading experiment (side) -
 Examinee pulled upward for weight offloading experiment
Examinee pulled upward for weight offloading experiment -
 Examinee walking on a treadmill under low-gravity simulated environment using ARGOS
Examinee walking on a treadmill under low-gravity simulated environment using ARGOS -
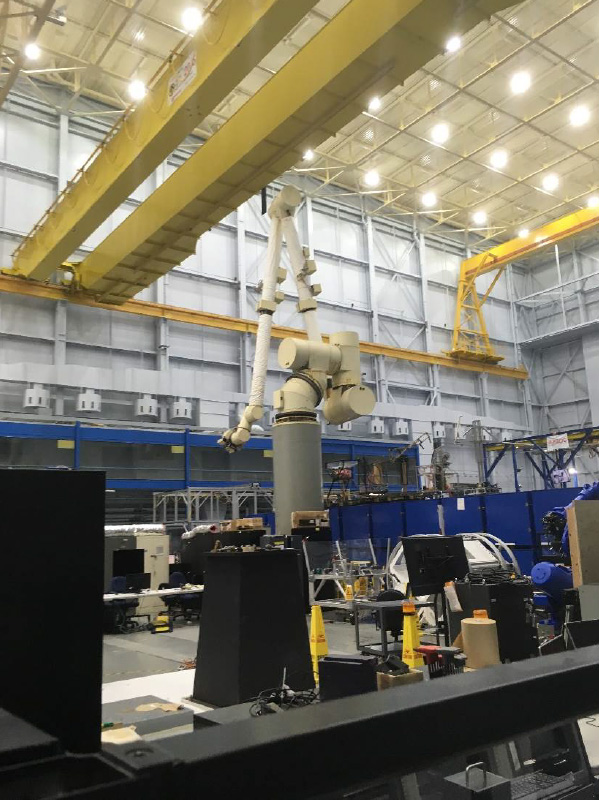 Inside of the ARGOS laboratory (experimental product of a robot arm of the ISS)
Inside of the ARGOS laboratory (experimental product of a robot arm of the ISS) -
 Inside of the ARGOS laboratory (Robonaut2, a robot for space work)
Inside of the ARGOS laboratory (Robonaut2, a robot for space work) -
 KIBO, the Japanese experiment module of the ISS, situated in the ARGOS laboratory for experiment training
KIBO, the Japanese experiment module of the ISS, situated in the ARGOS laboratory for experiment training -
 Inside of the Soyuz spacecraft situated in the ARGOS laboratory
Inside of the Soyuz spacecraft situated in the ARGOS laboratory -
 Various types of space suits for extravehicular activity and Robonaut2, situated in the ARGOS laboratory
Various types of space suits for extravehicular activity and Robonaut2, situated in the ARGOS laboratory -
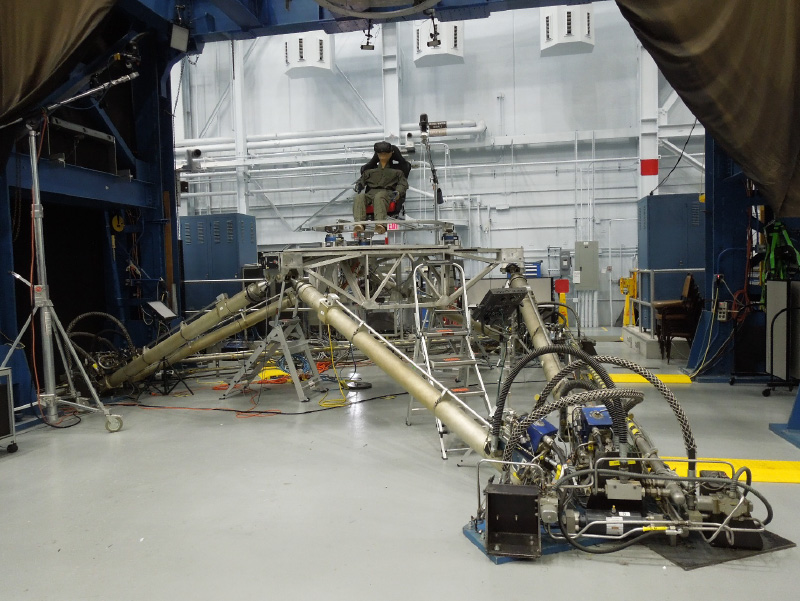 3D motion simulator for training, situated in the ARGOS laboratory
3D motion simulator for training, situated in the ARGOS laboratory -
 3D scanning device of human body (Examinee: Keisuke Araki)
3D scanning device of human body (Examinee: Keisuke Araki) -
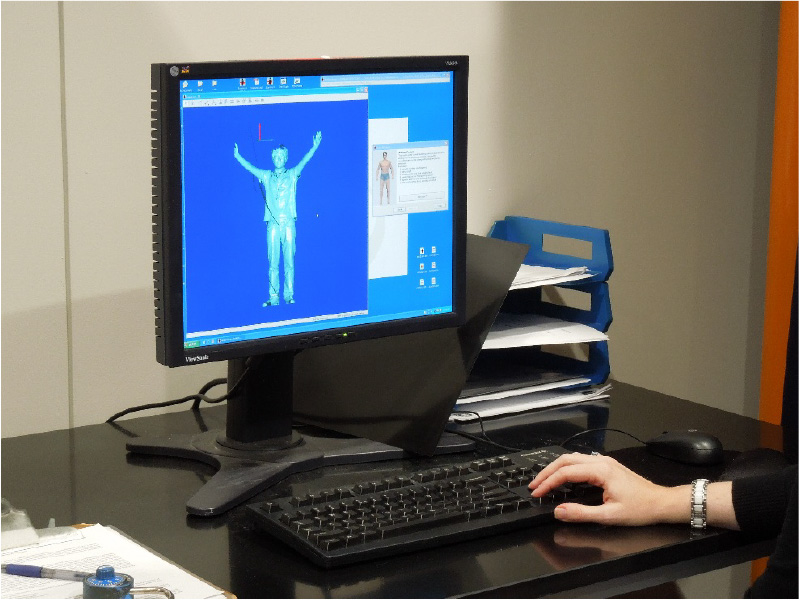 3D scanning device of human body (scan result)
3D scanning device of human body (scan result) -
 Experimental device to analyze motion range of upper arms when wearing a space suit (Examinee: Akihito Ito, Associate Professor of the Faculty of Science and Engineering, Doshisha University)
Experimental device to analyze motion range of upper arms when wearing a space suit (Examinee: Akihito Ito, Associate Professor of the Faculty of Science and Engineering, Doshisha University) -
 Experimental device to analyze motion range of upper arms when wearing a space suit (Examinee: Akihito Ito, Associate Professor of the Faculty of Science and Engineering, Doshisha University)
Experimental device to analyze motion range of upper arms when wearing a space suit (Examinee: Akihito Ito, Associate Professor of the Faculty of Science and Engineering, Doshisha University)
OVERVIEW
-
The Lyndon B. Johnson Space Center in Houston, Texas, is developing the Active Response Gravity Offload System (ARGOS) to simulate reduced gravity environments, such as Lunar, Martian, and microgravity, using a large scale, full motion robotic system.
- ARGOS supplies continuous offload of a portion of a person’s (or dynamic object’s) weight during dynamic motions such as walking, running, and jumping.
- ARGOS follows the person’s (or object’s) motion in the horizontal and vertical directions to maintain a vertical offload force.
- Rotational motion is accommodated by the ARGOS/payload interface mechanism.
- A fully realized ARGOS facility will be capable of supporting surface operation studies, suit and vehicle requirements development, suit and vehicle design evaluation, and training with both suited and shirt-sleeved participants.
- Such a facility will be capable of offloading the weight of rovers and robots for testing in simulated reduced gravity environments.
- ARGOS technology is intended to support testing, development, and training for future missions to Near Earth Asteroids, Micro-gravity environments, the Moon, Mars, or any other destination.
-
The project philosophy has been to design, fabricate, test, and then improve.
- The knowledge gained from this iterative approach has matured the project designs and requirements.
-
The current steel structure was built to accommodate movement in all three directions of motion (one vertical and two horizontal).
- Dimensions are 41’ x 24’ x 25’ tall.
|
Gallery ARGOS (Active Response Gravity Offload System) Kick-off Symposium Doshisha Week 2019 Other Activities |